XiLAB3dplus — Étude exploratoire
Le document peut comporter des erreurs : n’hésitez pas à nous contacter
Étude éléments finis paramétrique d’une cornière (L-bracket) sous CalculiX, automatisation de la chaîne du maillage à l’analyse, avec balayage de 50 designs et identification d’un front de Pareto masse / contrainte.
1. Objectif
Identifier les couples (masse, contrainte) accessibles pour un L-bracket en acier S235 chargé en flexion à son extrémité, en faisant varier trois paramètres géométriques :
- L — longueur d’aile (les deux ailes identiques)
- W — largeur (hors-plan)
- t — épaisseur
Sortie finale : un front de Pareto des designs non-dominés, et la loi multivariée σ = f(L, W, t) calée sur les calculs FEM.
2. Géométrie & paramètres
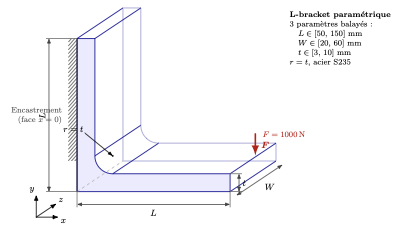
Cornière en L, ailes orthogonales, congé intérieur de rayon r = t pour
éviter la singularité d’angle droit.
| Paramètre | Symbole | Plage balayée |
|---|---|---|
| Longueur d’aile | L | 50 – 150 mm |
| Largeur | W | 20 – 60 mm |
| Épaisseur | t | 3 – 10 mm |
| Rayon de congé | r | r = t |
Matériau : acier S235
- E = 210 000 MPa
- ν = 0.3
- ρ = 7.85 × 10⁻⁹ t/mm³
- Re = 235 MPa
Unités de travail : mm, N, MPa, t.
3. Conditions aux limites
- Encastrement sur la face arrière de l’aile verticale (
x = 0) — toutes les composantes du déplacement bloquées. - Effort total
F = 1000 Ndirigé selon−y(vers le bas), réparti en forces nodales équivalentes (F/Npar nœud) sur la face d’extrémité de l’aile horizontale (x = L).
Le total de l’effort est constant entre designs ; seules les dimensions varient.
4. Maillage
gmsh 4.15 [2] — tétraèdres quadratiques C3D10 (4 sommets + 6 nœuds de mi-arête, fonction de forme parabolique → capture le gradient linéaire de déformation par élément, voir [5]).
Stratégie de tailles :
- Au congé : taille
h = r/6(≈ 6 éléments le long du quart de cercle) - En volume (loin du congé) : taille
h = t/3— garantit la règle des 3 éléments dans l’épaisseur, recommandation standard pour capturer un gradient linéaire de déformation dans une section fléchie [6].
| Cas | n_nœuds | n_éléments | h_médiane / t |
|---|---|---|---|
| L=50, W=20, t=3 | 90 k | 56 k | 2.8 |
| L=100, W=40, t=6 | 89 k | 56 k | 2.9 |
| L=150, W=60, t=10 | 76 k | 48 k | 3.1 |
Note permutation Tet10 dans le passage Gmsh > Calculix : les nœuds 9 et 10 sont
permutés entre la convention gmsh et la convention CalculiX
C3D10. Cette permutation est appliquée à l’écriture du .inp.
Visualisation des 50 maillages générés de manière automatique grâce à un script Python (ordre de calcul ; cadre rouge = front de Pareto) :
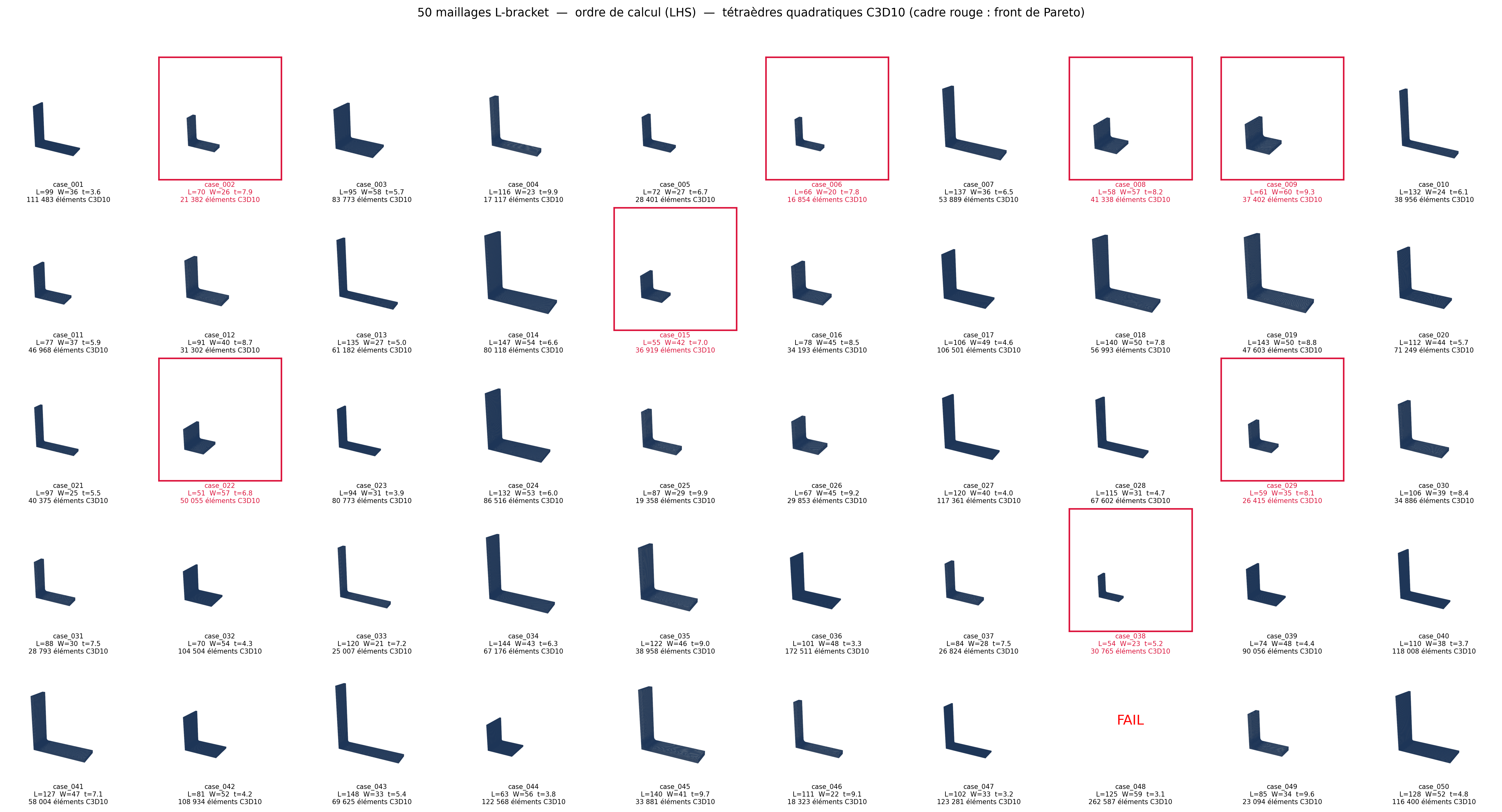
On observe que les cas à faible épaisseur (t = 3 mm) sont sensiblement
plus densément maillés (jusqu’à 130 k éléments) que les cas plus épais
(t = 10 mm, ~25 k éléments) : la contrainte h ≤ t/3 impose une
taille de maille proportionnelle à l’épaisseur.
5. Solveur
CalculiX 2.23 [1] en analyse linéaire statique. Solveur direct SPOOLES.
Sorties par cas :
model.frd— résultats binaires CalculiX (relisibles par CGX)model.vtu— converti viaccx2paraview(ouvrable dans ParaView [9])
6. Exemples de champ de contraintes
Sur un design optimal déduit du Pareto (case 008 : L=58, W=57, t=8.2, masse 0.40 kg, σ_max = 86 MPa) :
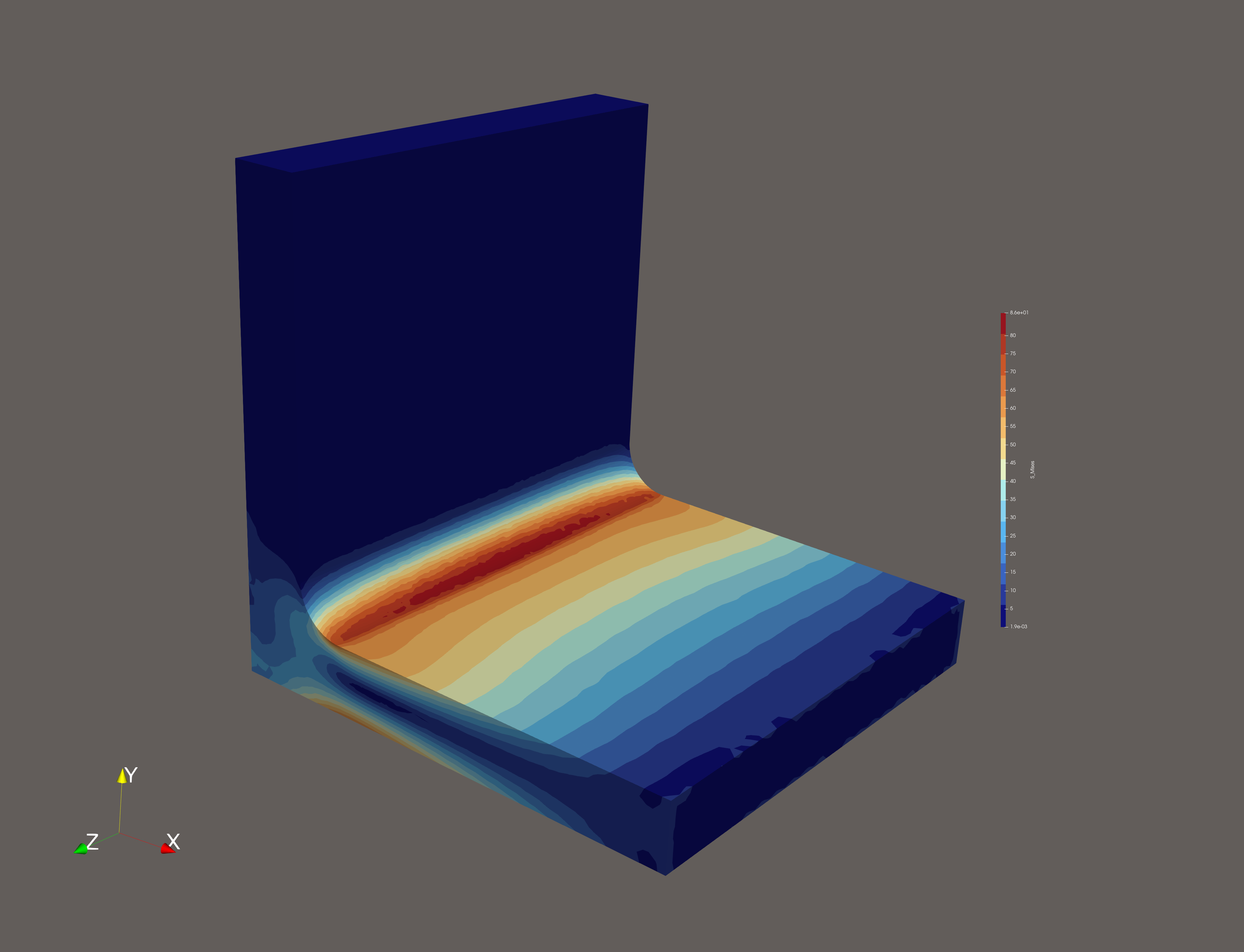
La concentration de contrainte se localise nettement le long du congé intérieur ; ailleurs la pièçe est très peu sollicité.
Sur un design plus fin (case 047 : L=102, W=33, t=3.2, masse 0.16 kg, σ_max = 2265 MPa, u = 17 mm) :
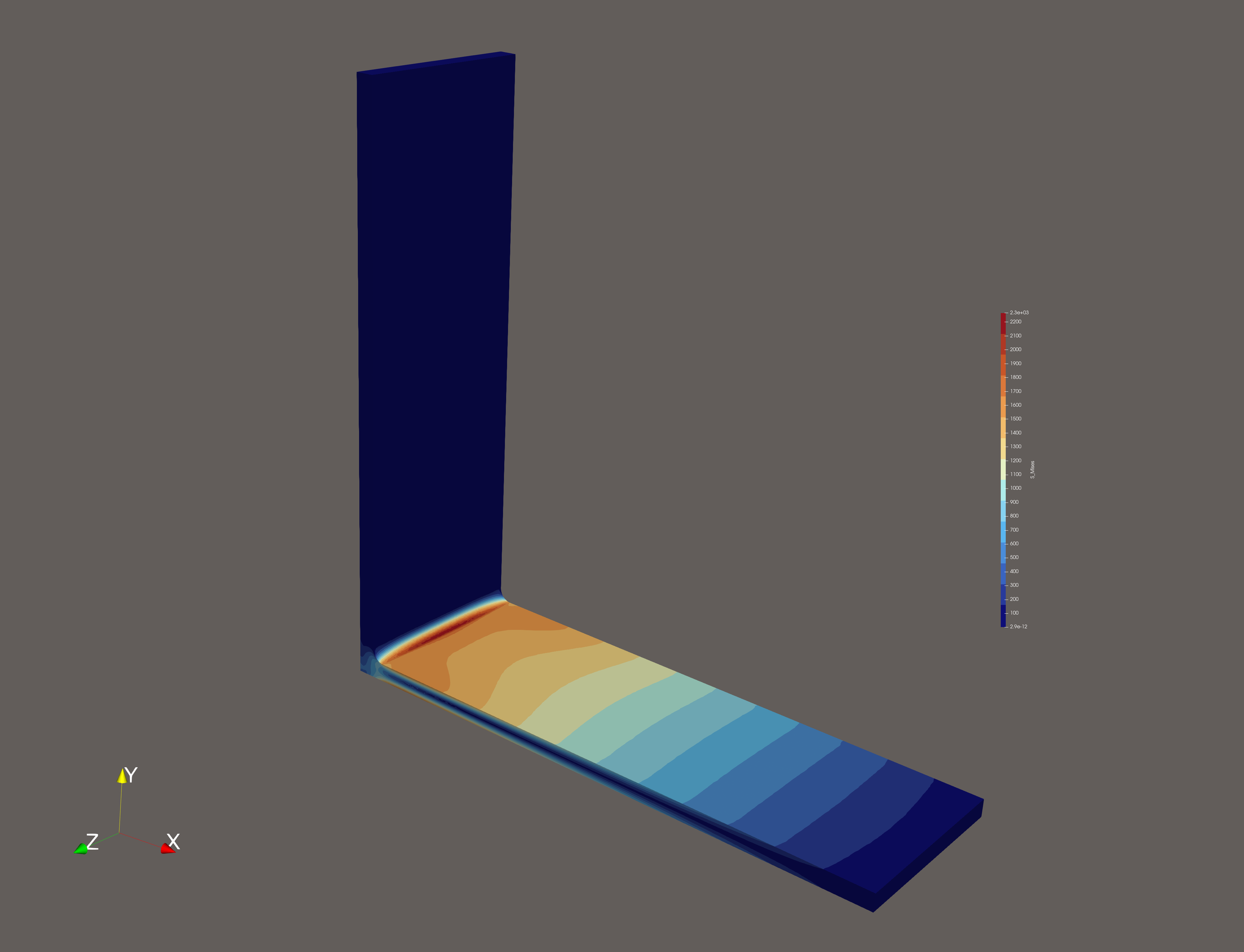
La pièce a une flèche élevée (déformation tracée à l’échelle réelle ×1), et la contrainte au congé dépasse largement la limite élastique de l’acier. Ce design serait inutilisable en pratique — il sert ici à borner le domaine d’étude.
Mesure de σ_vM_max : dans le script Python on filtre la mesure
σ_vM_max sur la zone du congé (x ∈ [t, t+r] × y ∈ [t, t+r]) pour
ignorer la singularité d’encastrement et les pics au point d’application
de la charge (principe de Saint-Venant [7]). La quantité extraite est
donc la contrainte structurellement dimensionnante, pas un artefact
de modélisation. Sa valeur dépend du facteur de concentration Kt du
congé [8].
7. Plan d’expérience
Latin Hypercube Sampling [4] sur les 3 paramètres, 50 échantillons. La méthode LHS donne une meilleure couverture du domaine que l’échantillonnage Monte-Carlo simple à effectif équivalent [10].
- 49 / 50 cas convergés en 37 min (1 cas — le plus fin+large — sature
les 16 Go de RAM sur Calculix et est marqué
FAIL). - Plage σ_vM_max observée : 66 – 3600 MPa
- Plage masse : 0.10 – 0.97 kg
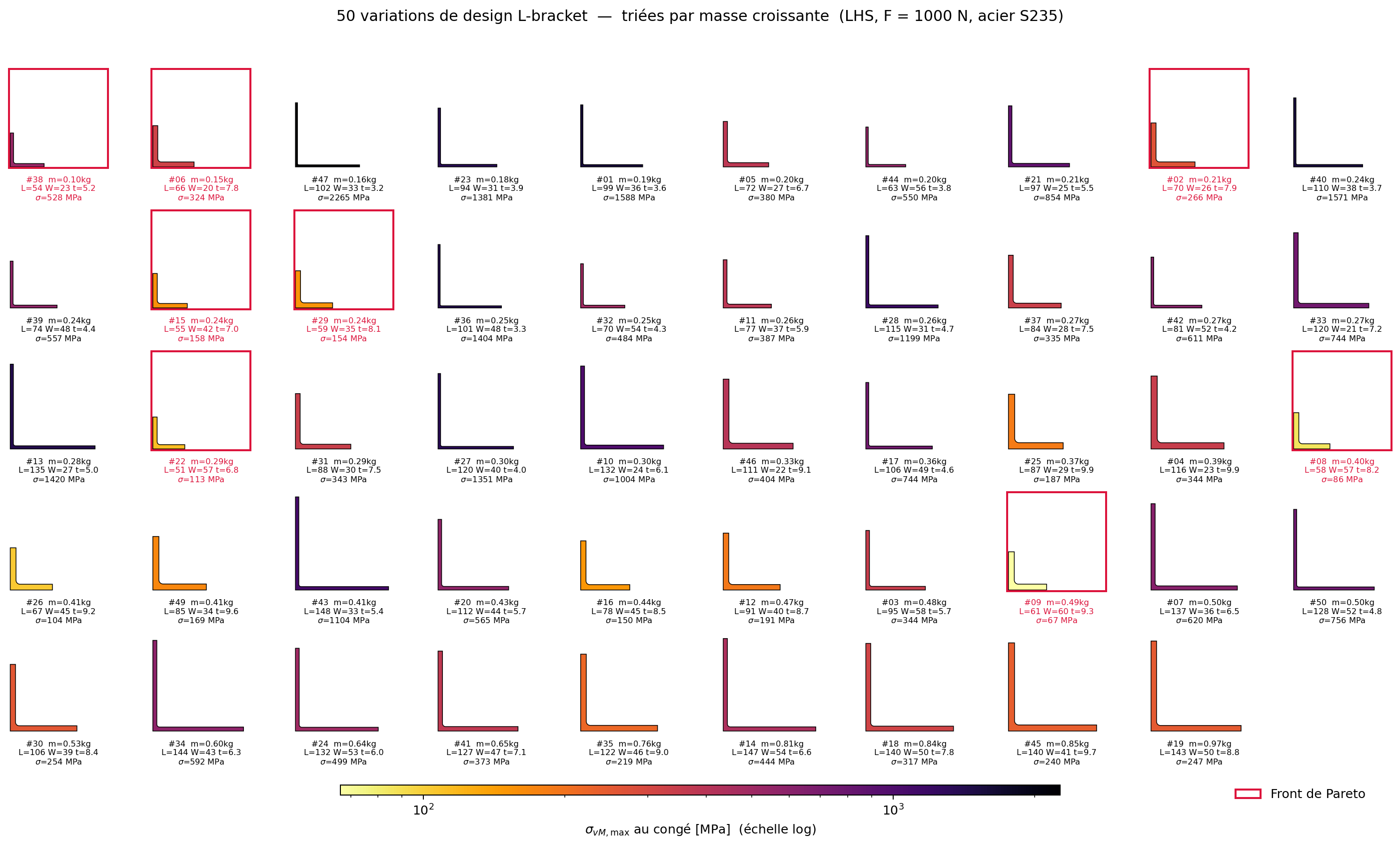
Aperçu des 50 designs balayés, à l’échelle absolue, triés par masse croissante (couleur = σ_vM,max ; cadre rouge = front de Pareto) :
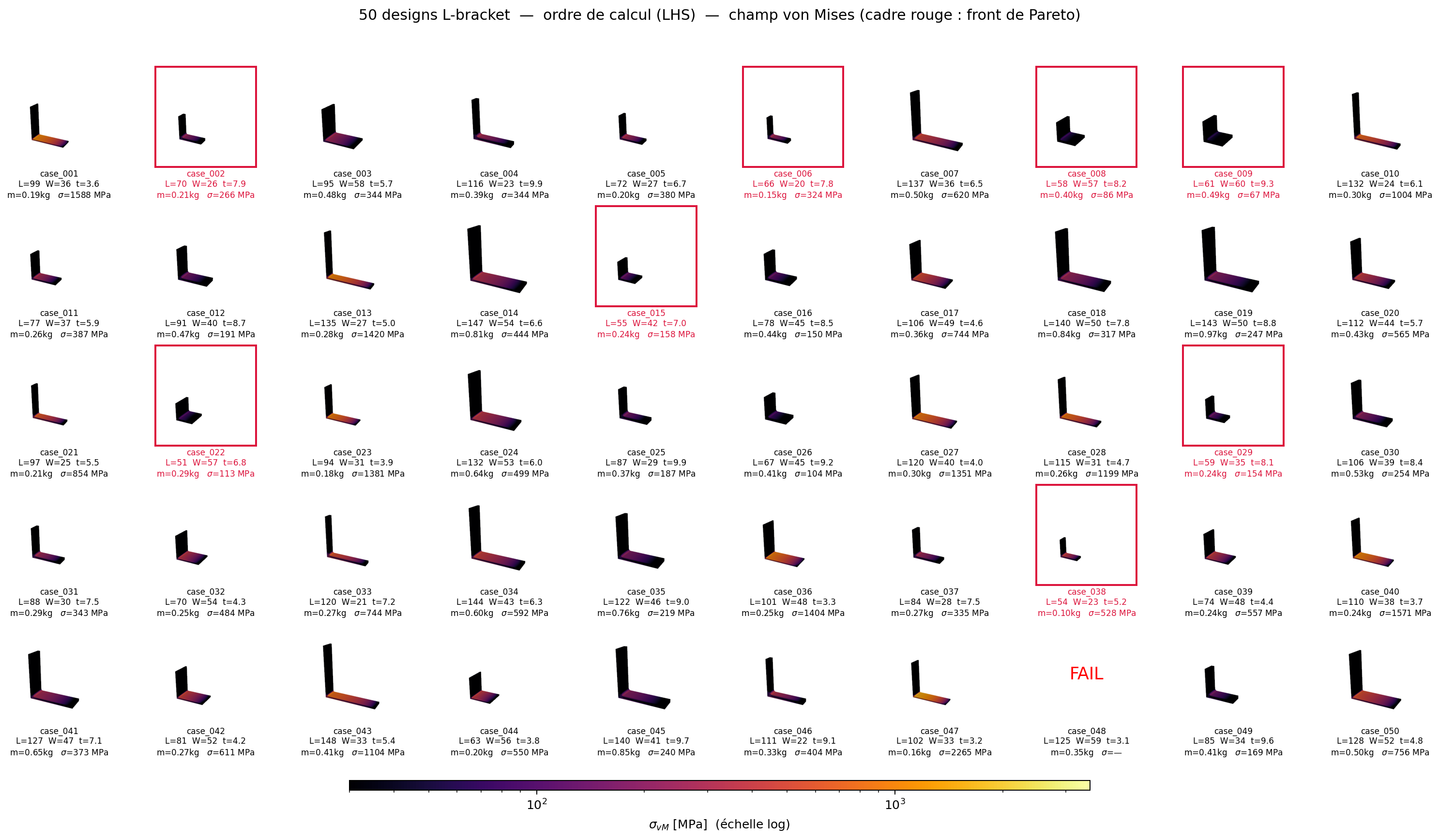
Même planche en rendu 3D, dans l’ordre de calcul (case_001 → case_050), chaque pièce colorée par σ_vM sur échelle logarithmique commune :
8. Front de Pareto
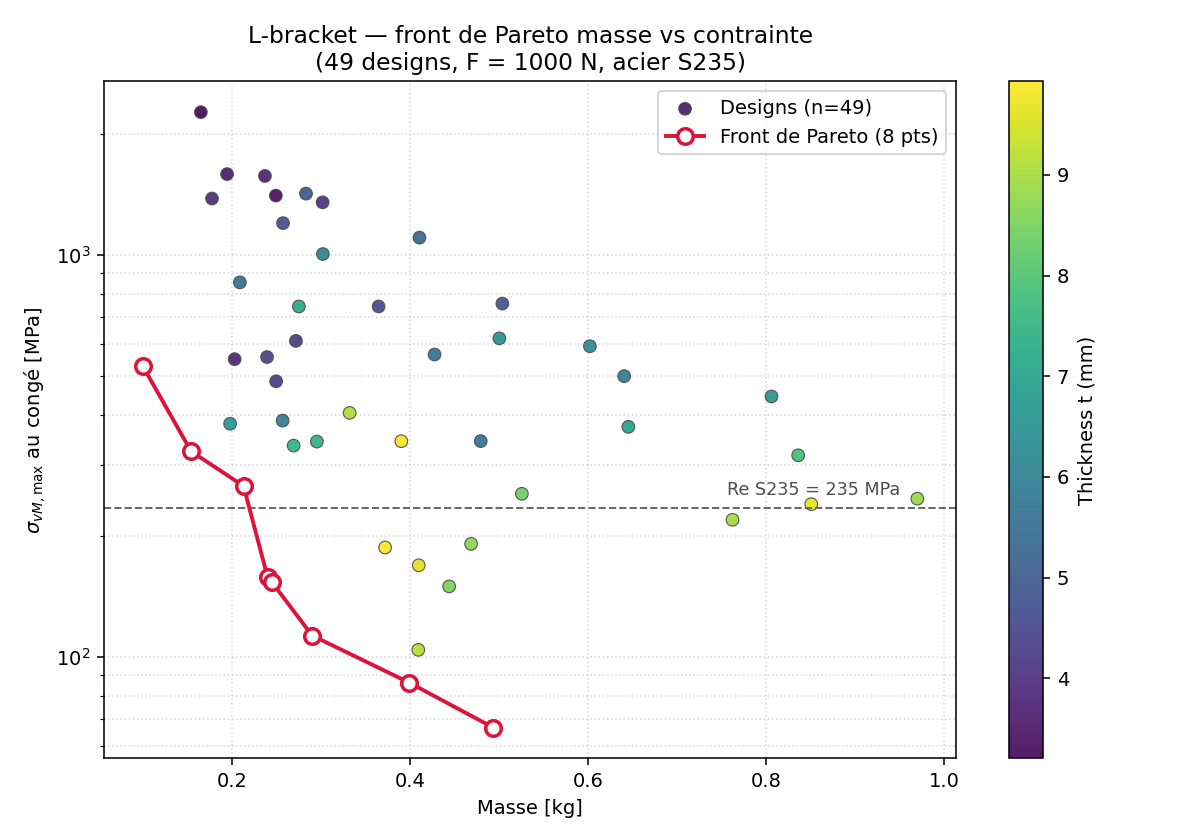
8 designs forment le front de Pareto (non-dominés au sens minimiser masse ET contrainte). De masse croissante :
| case | L (mm) | W (mm) | t (mm) | masse (kg) | σ_vM (MPa) | u (mm) |
|---|---|---|---|---|---|---|
| 038 | 53.9 | 23.4 | 5.24 | 0.099 | 528 | 0.68 |
| 006 | 65.6 | 20.1 | 7.82 | 0.154 | 324 | 0.41 |
| 002 | 70.0 | 25.7 | 7.91 | 0.212 | 266 | 0.38 |
| 015 | 54.8 | 42.1 | 7.01 | 0.239 | 158 | 0.15 |
| 029 | 59.2 | 34.6 | 8.08 | 0.244 | 154 | 0.15 |
| 022 | 50.8 | 56.6 | 6.83 | 0.290 | 113 | 0.09 |
| 008 | 57.8 | 57.1 | 8.23 | 0.399 | 86 | 0.08 |
| 009 | 60.8 | 59.7 | 9.30 | 0.493 | 67 | 0.06 |
Analyse rapide :
Le front est décroissant : tout gain en masse coûte en contrainte et inversement [11].
Pour rester sous la limite d’élasticité S235 (235 MPa), il faut une masse d’au moins ~0.24 kg (voir le cas 15 - lien de téléchargement ci-dessous).
Tous les designs du front ont L ≤ 70 mm — les parties longues sont systématiquement dominées dans cette gamme de charge.
Les designs lourds en masse (>0.6 kg) sont dominés : pénalité de masse sans bénéfice en contrainte → à éviter.
9. Sensibilité
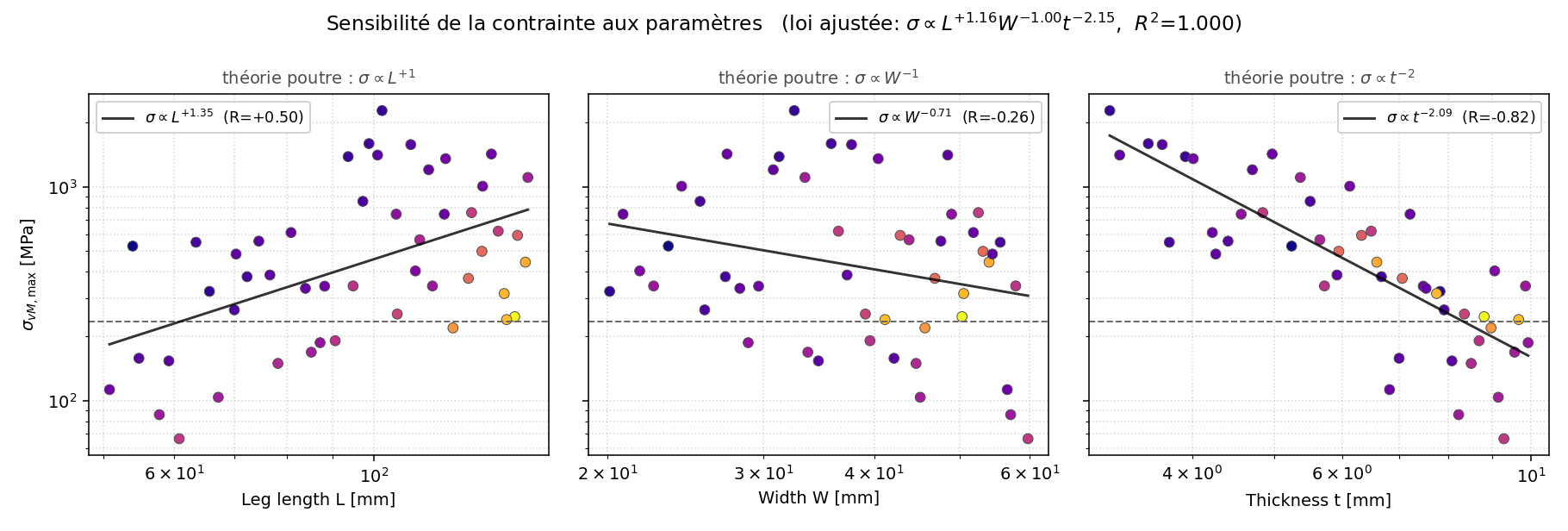
Sur chaque panneau, on a tracé la régression log-log
log σ ~ log(paramètre) avec sa pente et son coefficient de
corrélation R. Plus la droite est raide (|pente|) et plus
les points collent (|R| → 1), plus le paramètre est dominant.
| Paramètre | Pente | R | Lecture |
|---|---|---|---|
| L (long.) | +1.35 | +0.50 | tendance modérée, nuage diffus |
| W (larg.) | −0.71 | −0.26 | tendance faible |
| t (ép.) | −2.09 | −0.82 | tendance forte, points alignés |
Annexe — reproductibilité
# Étude complète
python3 run_study.py 50 --clean # ≈ 37 min sur Mac M-series, 1 thread
# Post-traitement
python3 plot_pareto.py # front + sensibilité + loi multivariée
python3 render_stress.py 8 # rendu d'un cas particulier
# Visualisation ParaView
paraview results/case_008/model.vtu
Scripts Python du projet :
| fichier | rôle |
|---|---|
geometry.py | construit la géométrie + mailleur gmsh (raffinement local, règle 3 él. dans t) |
solver.py | génère le .inp CalculiX, lance ccx_2.23, convertit .frd → .vtu, extrait σ_vM et u_max |
run_study.py | LHS + boucle 50 cas + écriture results/summary.csv |
plot_pareto.py | front de Pareto, sensibilité, loi multivariée (non précisée dans ce rapport intéermédiare) |
render_stress.py | rendu pyvista d’un cas avec champ de contraintes |
check_through_thickness.py | vérifie le nombre d’éléments dans l’épaisseur |
Versions logicielles utilisées : CalculiX 2.23, gmsh 4.15.1, ccx2paraview, meshio 5.3.5, numpy 2.1, scipy 1.17, pandas 2.3, matplotlib 3.10, pyvista 0.47.
Accès aux 50 cas tests — l’intégralité des fichiers d’entrée et
de sortie (.inp CalculiX, .frd résultats binaires, .vtu pour
ParaView) est mise à disposition ici :
Télécharger l’archive (50 cas).
Références
[1] Dhondt, G. (2004). The Finite Element Method for Three-Dimensional Thermomechanical Applications. Wiley, Chichester. — Base théorique de CalculiX, par son auteur. Voir aussi le manuel utilisateur en ligne : Dhondt, G. & Wittig, K., CalculiX CrunchiX User’s Manual, http://www.dhondt.de/ccx_2.23.pdf.
[2] Geuzaine, C., & Remacle, J.-F. (2009). “Gmsh: A 3-D finite element mesh generator with built-in pre- and post-processing facilities.” International Journal for Numerical Methods in Engineering, 79(11), 1309–1331. https://doi.org/10.1002/nme.2579.
[3] Marot, C., Pellerin, J., & Remacle, J.-F. (2019). “One machine, one minute, three billion tetrahedra.” International Journal for Numerical Methods in Engineering, 117(9), 967–990. https://doi.org/10.1002/nme.5987. — Algorithme HXT utilisé pour le maillage 3D parallèle de gmsh.
[9] Ahrens, J., Geveci, B., & Law, C. (2005). “ParaView: An End-User Tool for Large Data Visualization.” In Visualization Handbook, Elsevier. ISBN 978-0123875822.
[5] Zienkiewicz, O. C., Taylor, R. L., & Zhu, J. Z. (2013). The Finite Element Method: Its Basis and Fundamentals (7e éd.). Butterworth-Heinemann. — Référence canonique sur les éléments quadratiques (tétraèdre Tet10 / C3D10, fonctions de forme paraboliques).
[6] Cook, R. D., Malkus, D. S., Plesha, M. E., & Witt, R. J. (2002). Concepts and Applications of Finite Element Analysis (4e éd.). Wiley. ISBN 978-0471356059. — Discussion de la règle empirique des 3 éléments dans l’épaisseur pour capturer un gradient linéaire de déformation.
[7] Toupin, R. A. (1965). “Saint-Venant’s Principle.” Archive for Rational Mechanics and Analysis, 18, 83–96. https://doi.org/10.1007/BF00282253. — Énoncé moderne du principe de Saint-Venant invoqué pour ignorer les pics de contrainte au voisinage de l’encastrement et du chargement.
[8] Pilkey, W. D., & Pilkey, D. F. (2008). Peterson’s Stress
Concentration Factors (3e éd.). Wiley. ISBN 978-0470048245. —
Tabulation des facteurs Kt pour congés et changements de section.
[4] McKay, M. D., Beckman, R. J., & Conover, W. J. (1979). “A Comparison of Three Methods for Selecting Values of Input Variables in the Analysis of Output from a Computer Code.” Technometrics, 21(2), 239–245. https://doi.org/10.2307/1268522. — Article fondateur du Latin Hypercube Sampling.
[10] Helton, J. C., & Davis, F. J. (2003). “Latin hypercube sampling and the propagation of uncertainty in analyses of complex systems.” Reliability Engineering & System Safety, 81(1), 23–69. https://doi.org/10.1016/S0951-8320(03)00058-9.
[11] Deb, K. (2001). Multi-Objective Optimization using Evolutionary Algorithms. Wiley. ISBN 978-0471873396. — Cadre formel du front de Pareto et de la domination dans l’optimisation multi-objectif.
[12] Buckingham, E. (1914). “On Physically Similar Systems; Illustrations of the Use of Dimensional Equations.” Physical Review, 4(4), 345–376. https://doi.org/10.1103/PhysRev.4.345. — Théorème π, justification des lois en produit de puissances ajustées par régression log-log.
[13] Wooldridge, J. M. (2019). Introductory Econometrics: A Modern Approach (7e éd.). Cengage. ISBN 978-1337558860. — Chapitre 3 : biais de variable omise et différence entre coefficient simple et coefficient partiel en régression multiple.
[14] Timoshenko, S. P., & Gere, J. M. (1972). Mechanics of Materials.
Van Nostrand Reinhold. — Formule classique de la flexion d’une poutre
encastrée-libre, base de l’expression σ = 6FL/(Wt²) utilisée comme
référence analytique.