L’optimisation topologique répond à une question simple : quelle est la forme la plus efficace pour reprendre un effort donné avec le moins de matière possible ? La réponse — pas forcément intuitive — produit des structures en treillis, des arches, des nervures, qui rappellent les os ou les branches d’un arbre. Ce sont les formes que la nature a optimisées depuis des millions d’années : on peut parler de biomimétisme numérique.
Chez XiLAB3D+, nous avons développé TopiX, un outil (pour le moment à l’état expérimental) en Python d’optimisation topologique basé sur des logiciels libres. Cet article en présente la méthode et le fonctionnement, illustrés par le cas classique de la poutre encastrée-libre (cantilever). L’objectif est de pouvoir avoir un support dont on ma^trise le développement pour ajouter des fonctions métiers bien spécifiques, ce qui est très difficile en utilisant des outils commerciaux.
La méthode SIMP en quelques mots
La méthode SIMP (Solid Isotropic Material with Penalization, Bendsøe 1989 / Sigmund 2001) est aujourd’hui la référence académique et industrielle pour l’optimisation topologique. Le principe est le suivant. Une investiguation est également en cours sur la méthode des Lignes de Niveaux.
On part d’un domaine de conception rempli uniformément de matière, et on cherche à minimiser la déformabilité globale de la structure (compliance) en ne conservant qu’une fraction cible du volume initial — typiquement 30 à 40 %.
À chaque élément du maillage, on associe une densité ρ ∈ [0, 1], et on pénalise les valeurs intermédiaires par une loi de puissance :
E(ρₑ) = Emin + (E₀ - Emin) · ρₑ^p
Avec p = 3 (exposant standard), un élément à ρ = 0,5 ne vaut mécaniquement que 12,5 % d’un élément plein. La pénalisation pousse l’optimiseur à trancher : plein ou vide.
À chaque itération, on résout le problème éléments finis, on calcule la sensibilité de la compliance par rapport à chaque densité, on filtre ces sensibilités pour éviter les instabilités numériques (effet damier), puis on met à jour les densités par la méthode du critère d’optimalité (appelé OC dans le reste du document). On répète jusqu’à obtenir une convergence.
TopiX : le processus complet, de la géométrie STL à la surface finale
Le choix de conception de TopiX est de rester entièrement piloté par la géométrie. L’utilisateur fournit trois fichiers STL :
piece.stl— le domaine de conception (volume complet de la pièce)force_vol.stl— un volume simple (boîte ou cylindre) représentant la zone de chargementfixed_vol.stl— un volume simple représentant l’encastrement
Ces volumes d’insert sont voxelisés sur la même grille que la pièce. Les éléments qu’ils contiennent restent qualifiés d’espaces de non-conception — l’optimisation ne peut pas les modifier, ce qui garantit la cohérence physique aux points d’application des efforts.
Le processus complet est le suivant :
piece.stl ────┐
force_vol.stl ─┤── voxelisation ──▶ maillage C3D8R ──▶ SIMP ──▶ STL lissé
fixed_vol.stl ─┘ (géométrie) + CL + VTU
Le solveur éléments finis utilisé est CalculiX. TopiX l’appelle en sous-processus à chaque itération et parse les résultats .frd pour extraire l’énergie de déformation élémentaire, paramètre nécessaire au calcul des sensibilités.
En sortie, TopiX produit :
- Des fichiers VTU à chaque itération, lisibles dans ParaView,
- Une surface lissée par Marching Cubes + lissage laplacien, directement utilisable en FAO ou impression 3D,
- Un fichier
.inpfinal pour re-simulation dans PrePoMax.
Cas test : la poutre cantilever
Le cas test classique de l’optimisation topologique est la poutre encastrée-libre : une poutre fixée à une extrémité, chargée verticalement à l’autre.
Configuration :
| Paramètre | Valeur |
|---|---|
| Dimensions | 100 × 30 × 20 mm |
| Maillage | 20 × 6 × 4 = 480 éléments C3D8R |
| Matériau | Acier — E = 210 000 MPa, ν = 0,3 |
| Encastrement | Face X = 0 (35 nœuds) |
| Effort | F = −1 000 N selon Y, centre de la face X = 100 mm |
| Fraction volumique | 40 % |
| Filtre r_min | 7 mm (1,4 × taille de maille) |
Résultat : après 60 itérations SIMP, la compliance est passée de ~8 500 à ~145 (réduction d’un facteur 60). Sur les 480 éléments du domaine, 116 restent solides — soit exactement 40 % de la matière initiale. La topologie obtenue est l’arc porteur classique : une membrure inférieure tendue, une membrure supérieure comprimée, et des diagonales reprenant les efforts tranchants.
La surface lissée finale (méthode Marching Cubes) est directement exportée en STL, notamment pour nos essais en impression 3D.
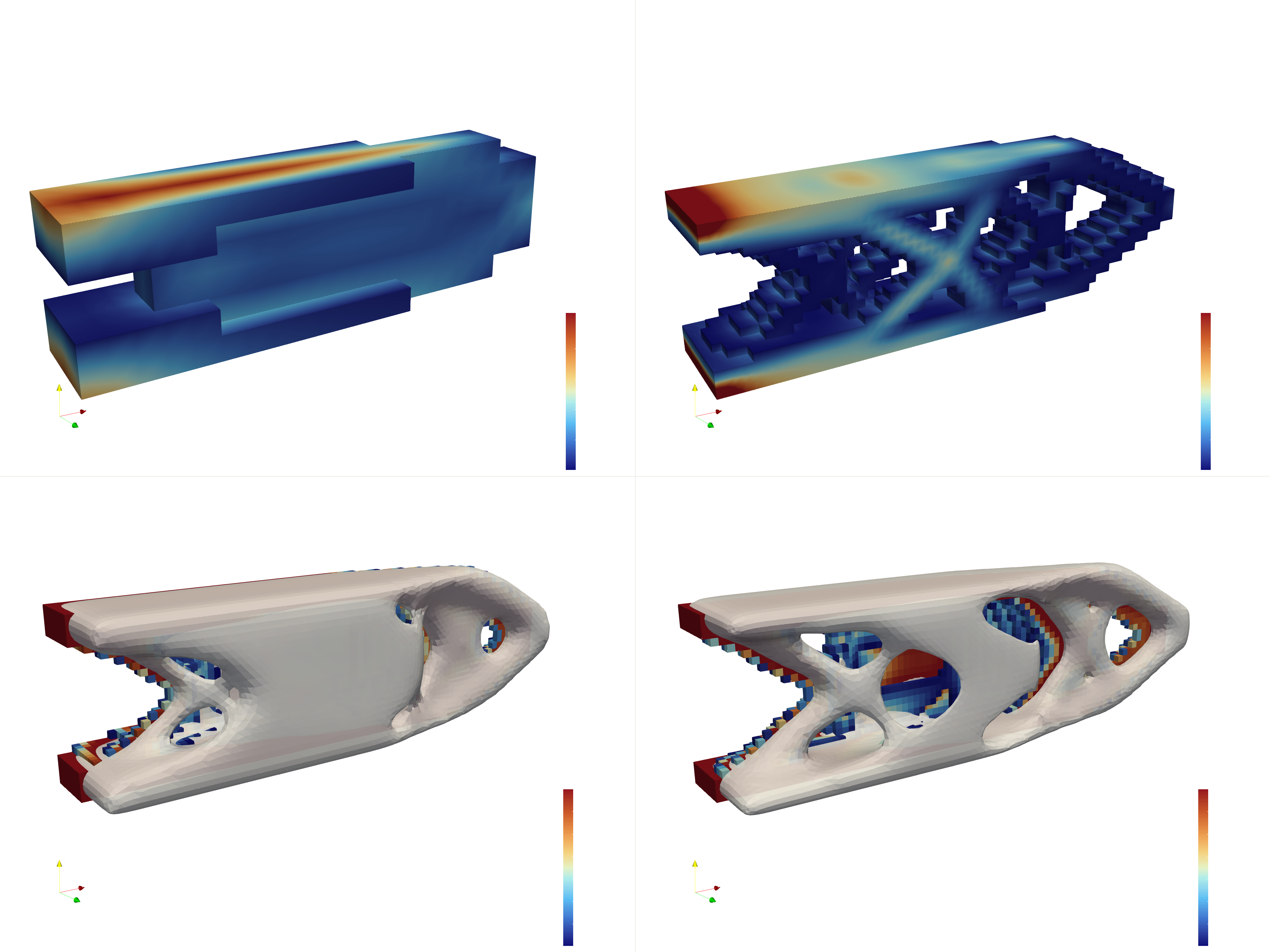
Exemples de tests de différentes tailles de maille et de réponse de l’algo Marching Cubes.
Originalités de l’implémentation
Voxelisation. Une des contraintes des applications de R&D prévues est de partir de modèles STL, le remaillage étant trop compliqué nous avons développé une voxelisation sur laquelle nous nous basons pour les calculs. Un voxel est représent par un élément fini de type hexadrique. Le critère de pré-dimensionnement dû à la voxelisation est évidemment une hypothèse à prendre en compte dans l’utilisation de ToPIX.
Conditions aux limites par volumes d’insert. Les zones de chargement et d’encastrement ne sont pas des surfaces projetées sur le maillage, mais des volumes voxelisés toujours solides. Cette approche est plus robuste à la position du maillage et physiquement plus cohérente (les inserts modélisent des bossages, des vis, des plots réels).
Contraintes de symétrie par moyennage de champs. Si la pièce est symétrique, l’utilisateur peut activer un ou plusieurs plans de symétrie (X, Y, Z). À chaque itération, les sensibilités et les densités sont moyennées avec leur image miroir — sans modifier le maillage ni les conditions aux limites. Le coût algorithmique est négligeable.
Amortissement OC. Un paramètre oc_damping (défaut : 1,0, sans amortissement) permet de mélanger la densité mise à jour avec la densité courante : ρ_new = d·ρ_OC + (1−d)·ρ. Avec d = 0,5, les oscillations en fin de convergence sont supprimées, au prix d’une convergence légèrement plus lente (YToPix n’est pas optimisé pour être rapide pour le moment).
Perspectives
TopiX est développé dans le cadre du programme de R&D AINUM-e de XiLAB3D+. Les prochaines étapes incluent :
- Le support des contraintes de contrainte (Von Mises), pour aller au-delà de la minimisation de compliance,
- L’intégration de contraintes métiers notamment des règles spécifiques à l’utilisation en Fabrication Additive
L’outil est disponible sur demande. Pour toute question ou collaboration : ngardan@xilab.tech
XiLAB3D+ — R&D · Mai 2026
Références
- Bendsøe, M.P. (1989). Optimal shape design as a material distribution problem. Structural Optimization, 1, 193–202.
- Sigmund, O. (2001). A 99 line topology optimization code written in Matlab. Structural and Multidisciplinary Optimization, 21(2), 120–127.
- Sigmund, O., Petersson, J. (1998). Numerical instabilities in topology optimization. Structural Optimization, 16(1), 68–75.